Computer Vision MT25, Homogenous coordinates and homographies
Flashcards
@Define how the point $(x, y)$ would be represented in homogeneous coordinates.
(technically this is an element of the equivalence class ${(\lambda x, \lambda y, \lambda) \mid \lambda \in \mathbb R}$)
@State the affine transformation matrix corresponding to a translation by $\delta _ x$, $\delta _ y$.
@State the affine transformation matrix corresponding to a uniform scaling by a factor of $s$.
@State the affine transformation matrix corresponding to an anti-clockwise rotation by angle $\theta$.
@State the affine transformation matrix corresponding to horizontal shearing by a factor of $m$.
@State the affine transformation matrix corresponding to vertical shearing by a factor of $m$.
@State three properties that all affine transformations preserve.
- Collinearity
- Parallelism
- Convexity
Suppose you have an affine transformation matrix
\[\begin{pmatrix}
a _ {11} & a _ {12} & a _ {13} \\
a _ {21} & a _ {22} & a _ {23} \\
0 & 0 & 1
\end{pmatrix}\]
How could you compute the source pixel corresponding to an output pixel $(x, y)$ when using a backward warp?
Homographies
@Define a homography $H$.
A transformation of 2D homogeneous coordinates $p$ of the form
\[H\begin{pmatrix}x \\ y \\ z \end{pmatrix} = \begin{pmatrix} h _ {11} & h _ {12} & h _ {13} \\ h _ {21} & h _ {22} & h _ {23} \\ h _ {31} & h _ {32} & 1 \end{pmatrix}\begin{pmatrix}x \\ y \\ z \end{pmatrix}\](technically the bottom-right entry does not have to be $1$, but since these coordinates are actually elements of an equivalence class, we often rescale the matrix to have bottom right value $1$).
How many point-to-point correspondences are required to determine a homography?
$4$, as long as no $3$ points lie on the same line.
Suppose you have $4$ point-to-point correspondences $A _ 1, A _ 2, A _ 3, A _ 4$ and $B _ 1, B _ 2, B _ 3, B _ 4$.
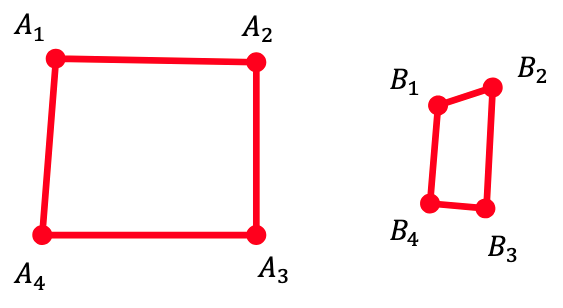
Supposing that the entries of the homography matrix are
\[\begin{pmatrix}
h _ {11} & h _ {12} & h _ {13} \\
h _ {21} & h _ {22} & h _ {23} \\
h _ {31} & h _ {32} & h _ {33}
\end{pmatrix}\]
how could you solve for $H$?
Writing the correspondences down and then collecting them into a linear system, we have
\[\begin{pmatrix} - A _ {x,1} & - A _ {y,1} & -1 & 0 & 0 & 0 & B _ {x,1}A _ {x,1} & B _ {x,1}A _ {y,1} & B _ {x,1} \\ 0 & 0 & 0 & - A _ {x,1} & - A _ {y,1} & -1 & B _ {y,1}A _ {x,1} & B _ {y,1}A _ {y,1} & B _ {y,1} \\ - A _ {x,2} & - A _ {y,2} & -1 & 0 & 0 & 0 & B _ {x,2}A _ {x,2} & B _ {x,2}A _ {y,2} & B _ {x,2} \\ 0 & 0 & 0 & - A _ {x,2} & - A _ {y,2} & -1 & B _ {y,2}A _ {x,2} & B _ {y,2}A _ {y,2} & B _ {y,2} \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ 0 & 0 & 0 & - A _ {x,4} & - A _ {y,4} & -1 & B _ {y,4}A _ {x,4} & B _ {y,4}A _ {y,4} & B _ {y,4} \end{pmatrix} \begin{pmatrix} h _ {11}\\ h _ {12}\\ h _ {13}\\ h _ {21}\\ h _ {22}\\ h _ {23}\\ h _ {31}\\ h _ {32}\\ h _ {33} \end{pmatrix} = 0\]Hence $H$ lies in the null space of this matrix, which can be found via the SVD.
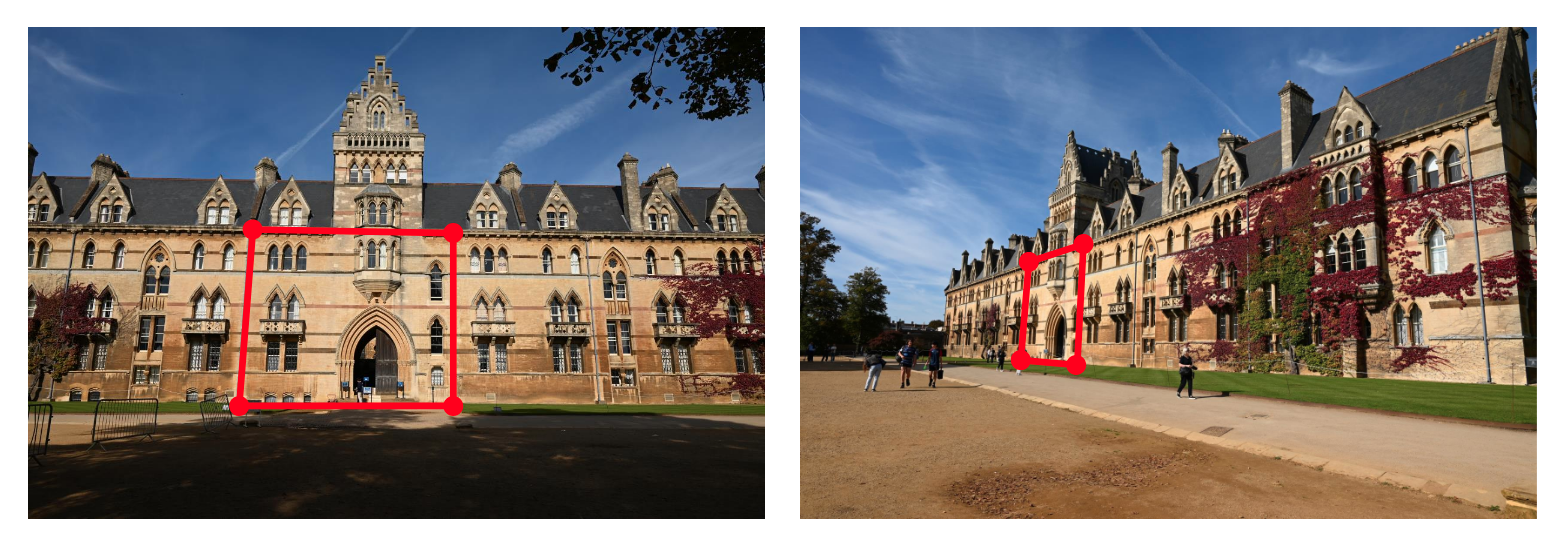
@Visualise how reversing the homography for the image on the right and overlaying it on the image on the right would look.

How may a line $l$ be represented in homogenous coordinates?
Lines are defined via $ax + by + c = 0$, so taking $l= (a, b, c)^\top$ and $x = (x, y, 1)^\top$, we may write this as
\[l^\top x = 0\]