Computer Vision MT25, Filtering
Flashcards
Suppose we are creating a new image $g$ from a source image $f$ by a filtering operation. The general setup is that
\[g(x, y) = F(N(x, y))\]
where $N$ is some neighbourhood of $(x, y)$. @Define a simple blur.
Suppose we are creating a new image $g$ from a source image $f$ by a filtering operation. The general setup is that
\[g(x, y) = F(N(x, y))\]
where $N$ is some neighbourhood of $(x, y)$. @Define a Gaussian blur.
where
\[w(u, v) = e^{-\frac{(x - u)^2 + (y-v)^2}{2\sigma^2}}\]Suppose we are creating a new image $g$ from a source image $f$ by a filtering operation. The general setup is that
\[g(x, y) = F(N(x, y))\]
where $N$ is some neighbourhood of . @Define a bilateral filter. What’s the intuition behind this?
where
\[\begin{aligned} w(u, v) &= w _ g(u, v) w _ s(u, v) \\ w _ g(u, v) &= e^{-\frac{(x - u)^2 + (y-v)^2}{2\sigma^2 _ g}} \\ w _ s(u, v) &= e^{-\frac{(f(u, v) - f(x, y)^2)}{2\sigma^2 _ s}} \end{aligned}\]The intuition is that there are now two factors affecting how important a pixel is to the averaging operation:
- How close it is to the pixel under consideration
- How similar it is to the pixel under consideration
@Visualise the difference between a bilateral filter and a Gaussian filter applied to the same image.

Suppose we are creating a new image $g$ from a source image $f$ by a filtering operation. The general setup is that
\[g(x, y) = F(N(x, y))\]
where $N$ is some neighbourhood of $(x, y)$. In this setup, how does a Gaussian blur work?
where
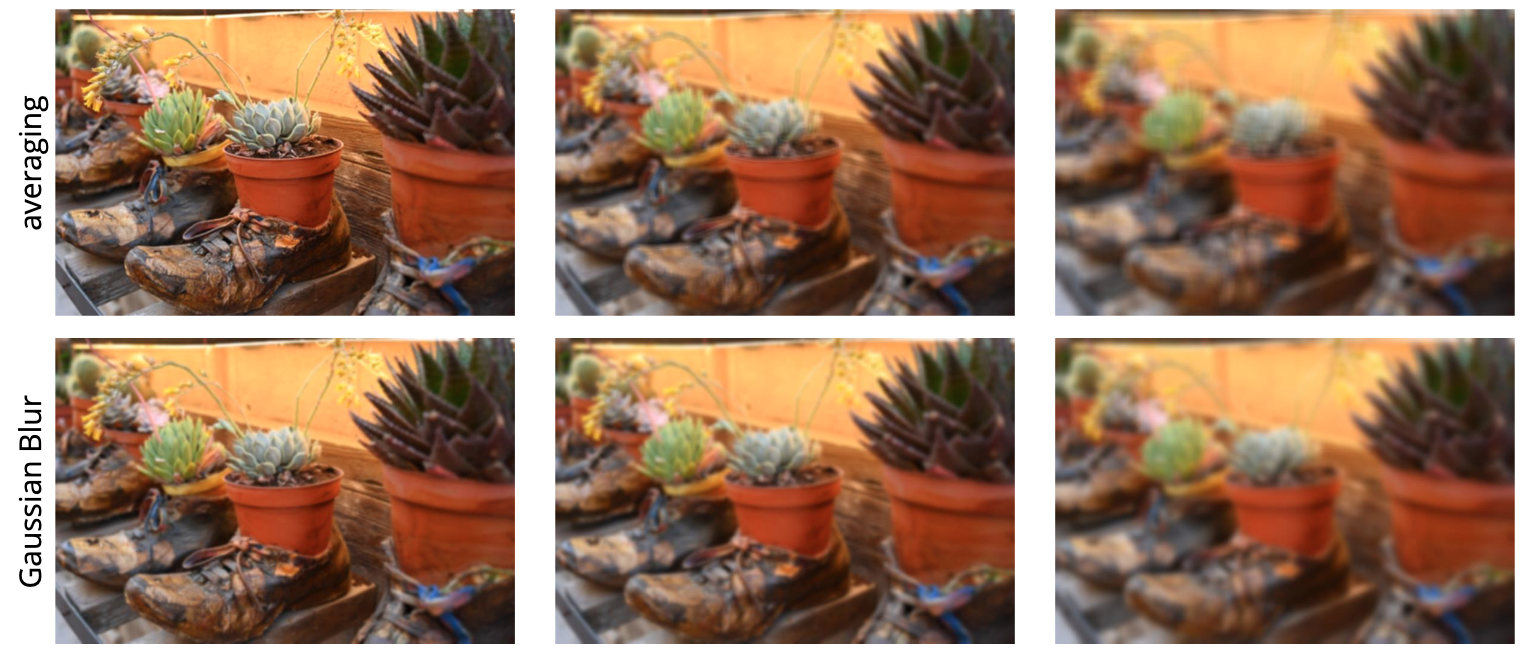
\[w(u, v) = e^{-\frac{(x - u)^2 + (y-v)^2}{2\sigma^2}}\]@Visuaslise the difference between an image filtered via a simple blur versus a Gaussian blur.
Suppose
What $f$ would be if $f \ast g$ corresponded to a $3 \times 3$ box blur?
@Visualise the effect of median filtering
\[F(N) = \text{median} _ {(u, v) \in N} \, f(u, v)\]
on an image. In what common circumstance is median filtering useful?

Median filtering is useful for outlier removal.